State Manager
Key Assumptions Made
Section titled “Key Assumptions Made”- Only one mission can be active at a time. If there is a currently active mission and the operator (user) starts another mission, the currently active mission will be set to complete and the new mission will be set to active.
- Mission Structure: Mission => Vehicles => Stages
- Zones are global to each mission. Every vehicle within that mission will share the same Keep In / Keep Out zones.
- By default, every mission will have all NGCP vehicles associated with them: MRA (CPP’s UAV), ERU (CPP’s UGV), and MEA (SLO’s UAV). However, not every vehicle is part of the mission. This is notated by whether a vehicle has a stage attached to them or not. If a vehicle has a stage initialized, they are part of the mission.
- When transitioning to another stage, the previous stage is marked as complete. The next stage is marked as active.
- Mission, Stage, and Vehicle state tracking (CRUD operations) are done with IDs generated by the PostGresSQL database. Any operation related to these rely on searching for the appropriate entry by ID.
- Once a mission has been started, no additional edits can be made.
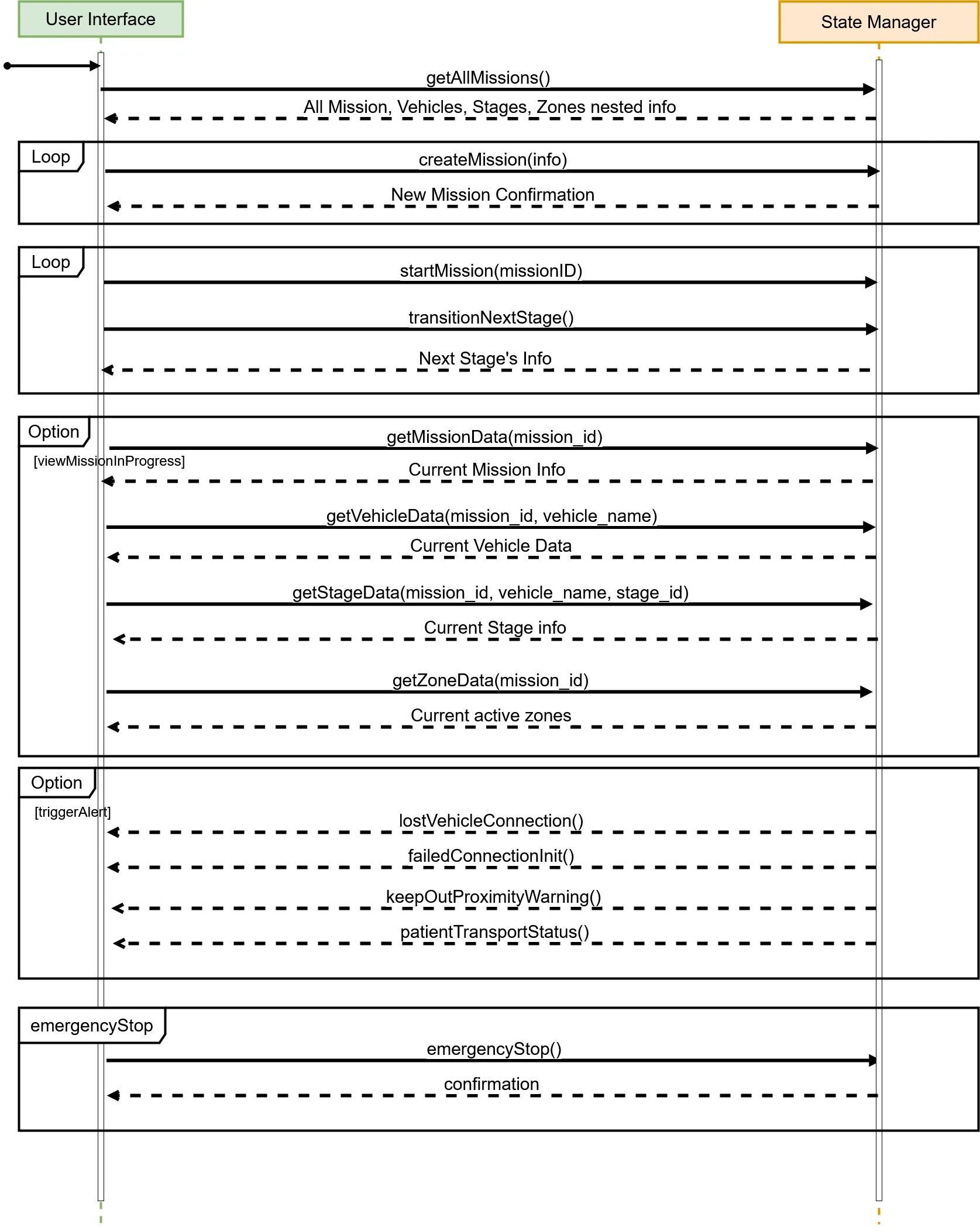
Sequence Diagram
Section titled “Sequence Diagram”This sequence diagram, displayed during PDR, generally outlines the general sequence of commands in the order executed (read top-down).
Function documentation and purpose
Section titled “Function documentation and purpose”- Stage manager initialization. It sets up the initial state of the mission with values from the database.
create_default_stage(stage_name, vehicle_id)
Section titled “create_default_stage(stage_name, vehicle_id)”- Creates a default stage placeholder for the mission. Information will be replaced with the actual stage information when inputted by the UI.
create_default_mission(mission_name)
Section titled “create_default_mission(mission_name)”- Creates a default mission placeholder. Information will be replaced with the actual mission information when inputted by the UI.
rename_mission(mission_id, mission_name)
Section titled “rename_mission(mission_id, mission_name)”- Renames the mission. Mission Name is supplied by the UI.
create_mission(mission_name)
Section titled “create_mission(mission_name)”- Creates a new mission. A mission placeholder will be initialized both in the database and the Rust State Manager using the create_default_mission() function.
delete_mission(mission_id)
Section titled “delete_mission(mission_id)”- Deletes the mission. The mission is removed from the database and the Rust State Manager, along with all associated stages and vehicles.
set_auto_mode(mission_id, vehicle_name, is_auto)
Section titled “set_auto_mode(mission_id, vehicle_name, is_auto)”- Toggles a specific vehicle into manual / automatic control.
add_stage(mission_id, vehicle_name, stage_name)
Section titled “add_stage(mission_id, vehicle_name, stage_name)”- Adds a new stage to the mission. A stage placeholder will be initialized both in the database and the Rust State Manager using the create_default_mission() function.
delete_stage(mission_id, vehicle_name, stage_id)
Section titled “delete_stage(mission_id, vehicle_name, stage_id)”- Deletes the stage from the mission. This is used when the user wants to delete a stage from the mission. The stage is removed from the database and all associated vehicles and zones are also removed.
rename_stage(mission_id, vehicle_name, stage_id, stage_name)
Section titled “rename_stage(mission_id, vehicle_name, stage_id, stage_name)”- Renames the stage. Stage Name is supplied by the UI.
transition_stage(mission_id, vehicle_name)
Section titled “transition_stage(mission_id, vehicle_name)”- Transitions the stage. The current stage is marked as complete and the next stage is marked as active.
add_zone(mission_name, zone_type)
Section titled “add_zone(mission_name, zone_type)”- Adds a new zone to the stage. This is used when the user wants to add a new zone to the stage. The zone is created with a default vehicle and a default stage.
delete_zone(mission_name, zone_type, zone_index)
Section titled “delete_zone(mission_name, zone_type, zone_index)”- Deletes the zone from the stage. This is used when the user wants to delete a zone from the stage. The zone is removed from the database and all associated vehicles and stages are also removed.